
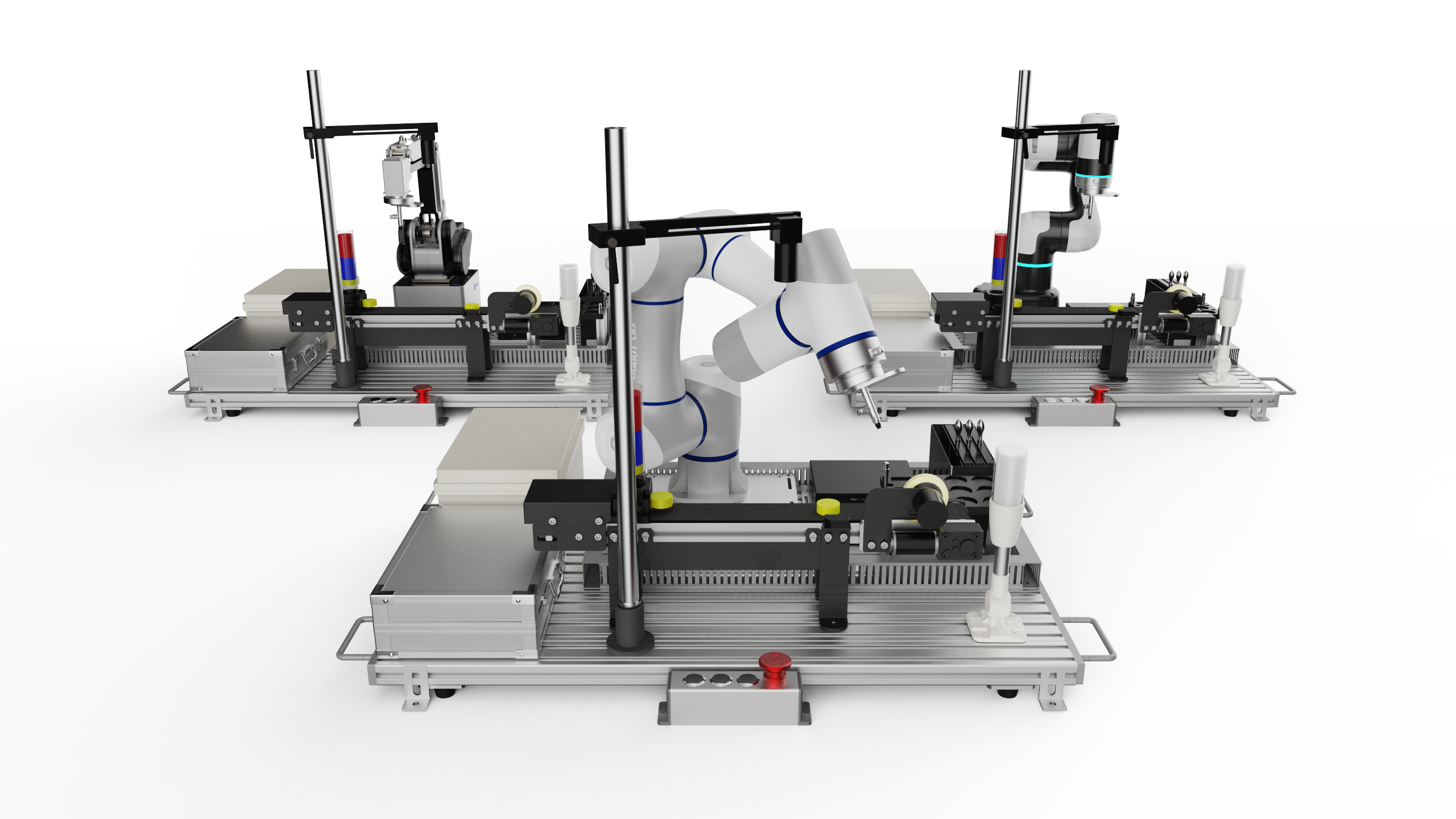
协作机器人点涂胶比人工更加均匀,九州酷游自研的动力学算法能够使机器人在曲线运动中保持良好的轨迹精度和稳定的运行速度,保证涂胶品质的一致性。同时,协作机器人完成一次涂胶的效率是人工的3倍以上。不仅如此,协作机器人空间占用小,操作简单,大幅降低了用户的部署时间和人力成本投入。
九州酷游自研 TrueMotion 动力学算法在保障运行精度与稳定性方面表现突出,机器人运行轨迹的精度可达 ±0.05 mm,即使在复杂曲线运动中也可保持匀速的移动,确保出胶的品质均匀,涂胶的质量稳定,可一次性高效完成 3C 电子、汽车制造各个环节中的涂胶任务。

轻量型协作机器人相比传统工业机器人占用空间小,用户无需对原有产线进行大幅改造,通过即插即用的组件,可快速部署,进行产线切换,实现各种点胶/涂胶作业任务。采用协作机器人,用户一方面节省了大量的产线切换成本,另一方面也提升了产线的运行效率,除适用于大批量生产外,还可满足柔性生产的需求。

九州酷游协作机器人操作简单,上手快,无需专业工程师,相比传统工业机器人可缩短 80% 的导入时间。通过拖动示教方式,配合简易的图形化编程,即可设置完成各种点胶/涂胶任务,有效降低人力成本和前期导入时间成本,从而大幅提高生产效率。






 汽车制造
汽车制造
 3C 制造
3C 制造
 金属加工
金属加工
 化工
化工
 食品饮料
食品饮料
 医疗
医疗
 新零售
新零售
 半导体
半导体
 自动化焊接
自动化焊接
 上下料
上下料
 无序分拣
无序分拣
 螺丝锁附
螺丝锁附
.svg) 点涂胶
点涂胶
 视觉检测
视觉检测
 打磨抛光
打磨抛光
 码垛
码垛




