
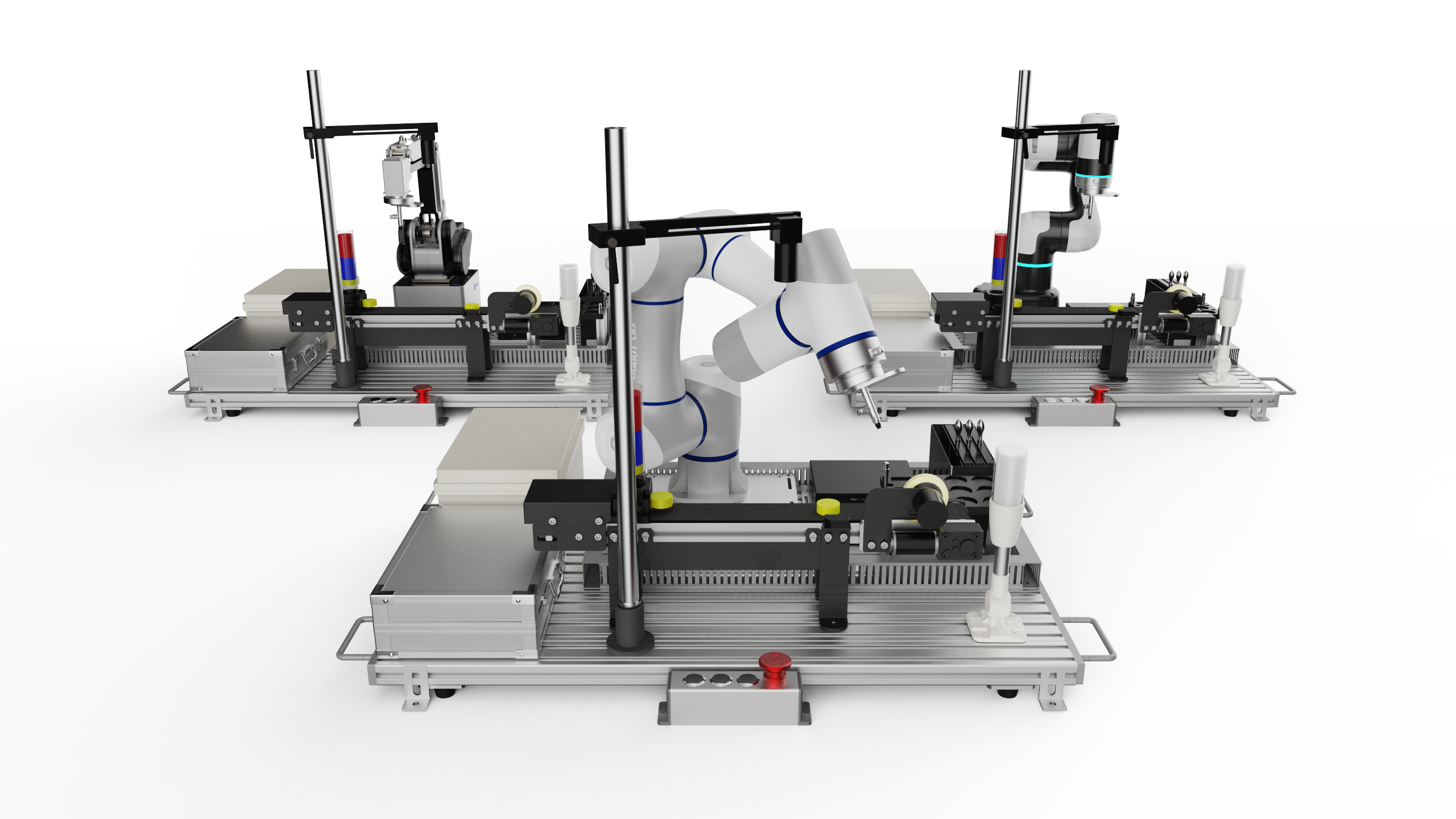
基于九州酷游自研 3D 视觉技术和 AI 深度学习算法,协作机器人可自主规划运行路径和姿态,准确抓取无序摆放的物料,高效执行分拣上料等任务,相比先摆盘再上料的传统自动化方式效率提升 30% 以上。
搭载 3D 视觉技术和 AI 算法的机器人可快速识别并捕捉物体轮廓形态,免去复杂的扫描建模等环节,无需提前对物料摆盘,协作机器人可直接抓取无序摆放的物体,简化了上料流程。

在物料无序摆放的复杂环境中,协作机器人能够快速识别目标物体的颜色、大小、形状、位置等信息,即使是混杂堆叠和被阴影遮挡的物体也能被快速识别并抓取,准确率高达 99%。

根据物体的三维信息、实时坐标和角度,协作机器人可以自主规划运动路径与位置控制,以最佳姿态准确的抓取无序物体,并放置到指定区域,省去示教,快速启动运行。






 汽车制造
汽车制造
 3C 制造
3C 制造
 金属加工
金属加工
 化工
化工
 食品饮料
食品饮料
 医疗
医疗
 新零售
新零售
 半导体
半导体
 自动化焊接
自动化焊接
 上下料
上下料
 无序分拣
无序分拣
 螺丝锁附
螺丝锁附
.svg) 点涂胶
点涂胶
 视觉检测
视觉检测
 打磨抛光
打磨抛光
 码垛
码垛




